一、设备说明:
分拣机按照预先设定的指令对物品进行分拣,并将分检出的物品送达指定位置的机械。要求伺服驱动能够准确的分度,将物品送到设定轨道,从而达到分拣功能。
二、工艺要求:
1、伺服驱动能准确定位。
2、分度时电机运转能不抖动。
三、系统构成:
分拣机使用一台伺服驱动和电机,电机通过齿轮控制分度盘进行平稳的转动,来控制物品运行到指定轨道。分度盘如下图:

电机通过皮带轮带动分度盘转动

电机

驱动器
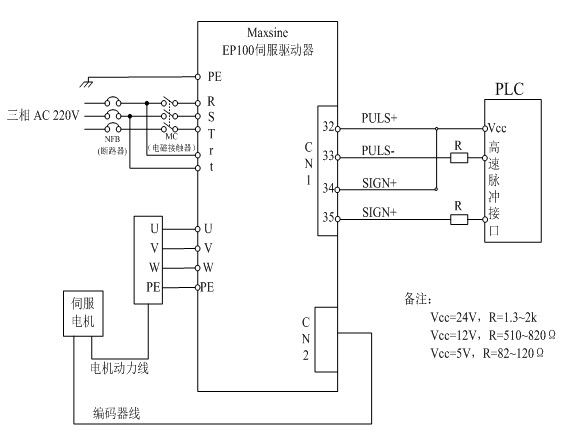
四、系统工作原理及接线说明:
伺服驱动器工作在位置模式,通过接受PLC的脉冲信号工作,电机的运行方向、运行速度都可以通过PLC进行调节。
系统原理接线图(以EP100为例):
五、参数设定:
|
功能代码 |
代码名称 |
设定参数 |
使用说明 |
|
PA-1 |
型号代码 |
2A-30 |
同伺服电机相匹配 |
|
PA-4 |
控制方式选择 |
0 |
位置控制 |
|
PA-5 |
速度比例增益 |
150 |
设置值越大,则刚度越大,过大容易出现振荡 |
|
PA-6 |
速度积分时间常数 |
20 |
设置值越小,则刚度越大,过小容易出现超调 |
|
PA-9 |
位置比例增益 |
100 |
设置值越大,则刚度越大,过大容易出现振荡或超调 |
|
PA-12 |
位置指令脉冲分频分子 |
1 |
设置相应值可以很方便的与各种脉冲源相匹配 |
|
PA-13 |
位置指令脉冲分频分母 |
1 |
设置相应值可以很方便的与各种脉冲源相匹配 |
|
PA-14 |
位置指令脉冲输入方式 |
0 |
设置与上位机相应的脉冲输入方式,默认为脉冲+方向 |
|
PA-15 |
位置指令脉冲方向取反 |
0 |
改变此参数可以很简单的改变电机的旋转方向 |
|
PA-20 |
驱动禁止输入无效 |
1 |
屏蔽限位功能 |
|
PA-53 |
低4位输入端子强制ON控制字 |
0001 |
强制使能 |









 联系我们
联系我们 CRM系统
CRM系统 在线服务
在线服务 官方微信
官方微信
