一、应用介绍
立柱式机器人码垛机主要是通过操控使用运动控制器或机器人示教器控制搬运码垛。立柱机器人码垛机每小时抓取400-500次,可选择单抓手和双抓手,速度和质量远高于人工码垛,操作精度高,工作范围大。码垛机占地面积小,动作灵活,每一台机器人都有独立的控制系统,保证了作业精度。相比机器人码垛机立柱式机器人更加经济实惠,能达到成本效用化,且主要构成零配件少,维持费用低,电源消耗低,结构简单故障率低,易于保养维护。
二、工艺要求
总线EtherCAT控制,在线诊断,远程维护
高粉尘环境下7×24小时稳定运行
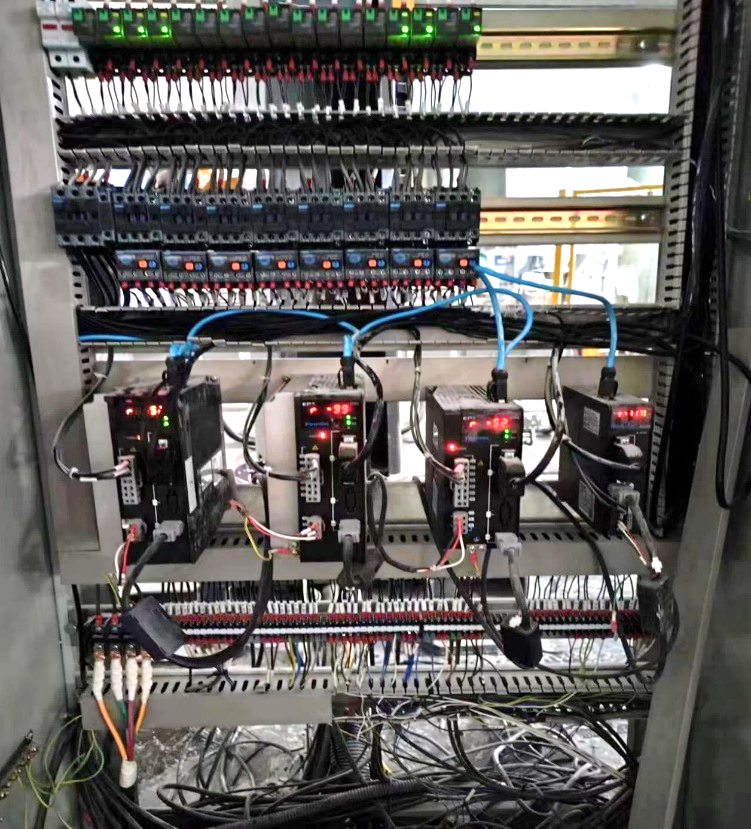
三、系统方案
控制系统易码运动控制器
驱动器EP5 TL15 EC 2台,EP5 TH30 EC 1台,
EP5 TL08 EC 1台
迈信电机130GSL05415MNA 2台,
130GSH08315MZA 1台,080BSL02430CNC1 1台

四、方案优势
模型算法提升,性能更加强劲
更加轻薄的外观设计,显著减小安装尺寸
全新接口设计,易用性更高
兼容性设计,通用性更强
五、设备说明 EP5-EC
电压:AC 220V/380V
功率:0.1kW~15kW
通讯接口:Modbus、CANopen、脉冲控制、EC总线、PN总线
380V系列驱动器省去外部24V控制电源接线;可选内置/外置制动电阻接口;可选直流电抗器接口
3kHz速度环响应带宽,最高支持25bit编码器,支持在线惯量识别、自动陷波、机械分析、增益自适应,总线系列产品支持全闭环控制
接口设计:兼容5V差分/24V单端指令脉冲输入,最高输入脉冲频率4MHz,7路DI/5路、DO功能自定义,总线系列产品使用弹簧接线端子,IO免焊接,1394型编码器接口
实用功能:可选动态制动器,支持远程固件升级,总线系列产品可选STO功能










 联系我们
联系我们 CRM系统
CRM系统 在线服务
在线服务 官方微信
官方微信
