EtherCAT(以太网控制自动化技术)是一种基于以太网技术,采用实时时钟同步的总线系统通讯方式,最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。
EP3E为武汉迈信电气技术有限公司研发生产的新一代EtherCAT以太网总线伺服。

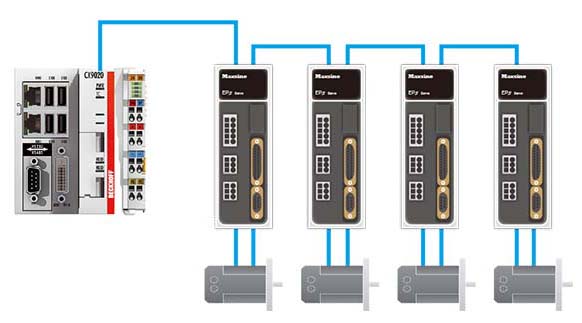
设备
Beckhoff CX9020控制器
EP3E-EC伺服驱动器
准备工作
首先EtherCAT通信需要记载EtherCAT从站信息的ESI文件(.XML格式)。主站通过ESI文件生成ENI,再构成EtherCAT网络。
将ESI文件保存到TwinCAT/3.1/Config/Io/EtherCAT 根目录下。下次开启TwinCAT软件时,才会自动扫描识别新加的ESI文件。
EP3E_EC的EtherCAT通信接口X5为进线口,X6为出线口,P304参数设置为1时EtherCAT通讯打开。
示例工程的建立
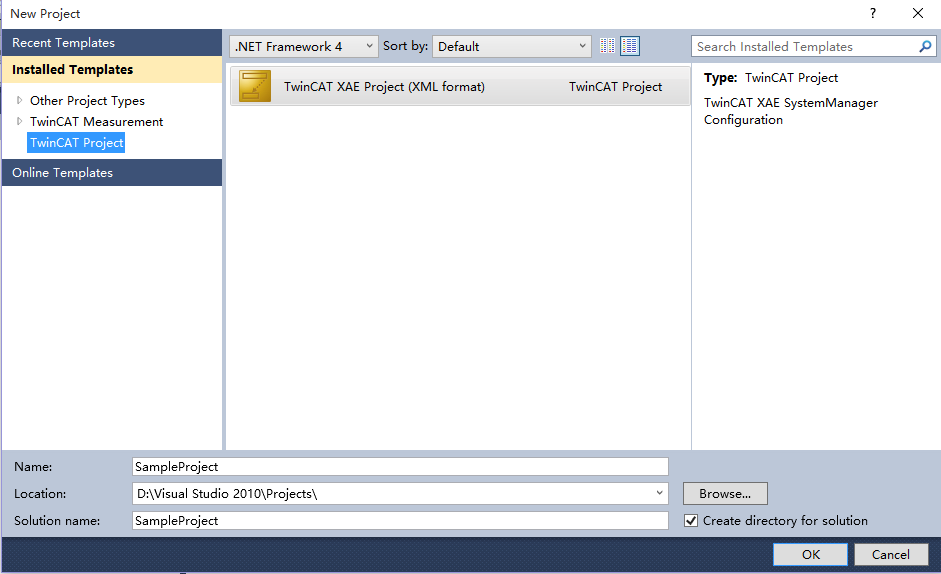
1、新建工程
在建立工程界面中选择TwinCAT Project,填入工程名称,选择工程保存地址,点击OK。
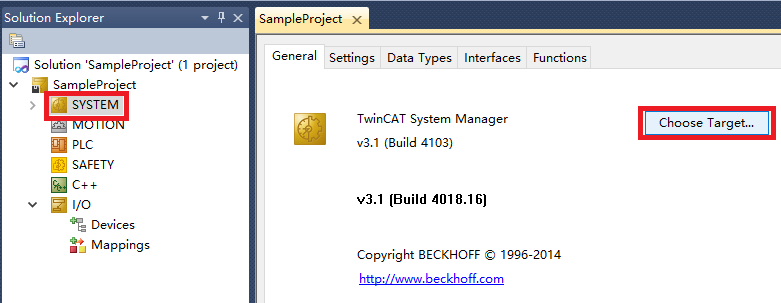
2、搜索并连接控制器:
用 PC 键盘的“ F8”按钮,或者在左侧工程栏双击SYSTEM,打开界面,点击“ Choose Target System”:
弹出“Choose Target System”窗体, 点击“search Ethernet”
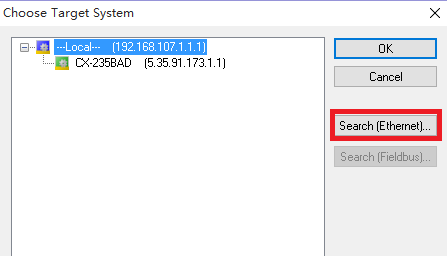
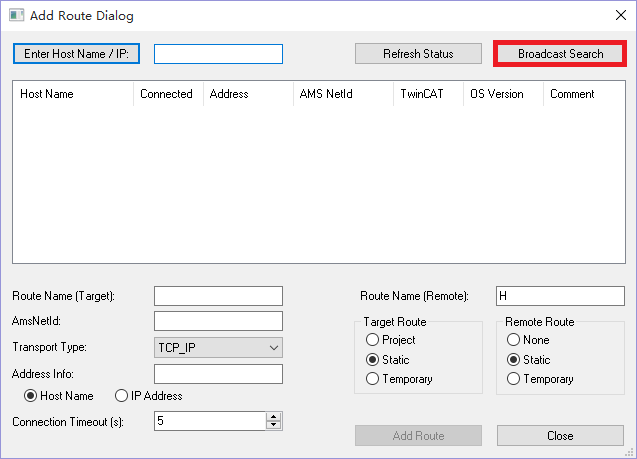
在弹出的窗体中点击“Broadcast Search”
选中目标机器:(确定PC的IP地址网段与控制器保持一致)
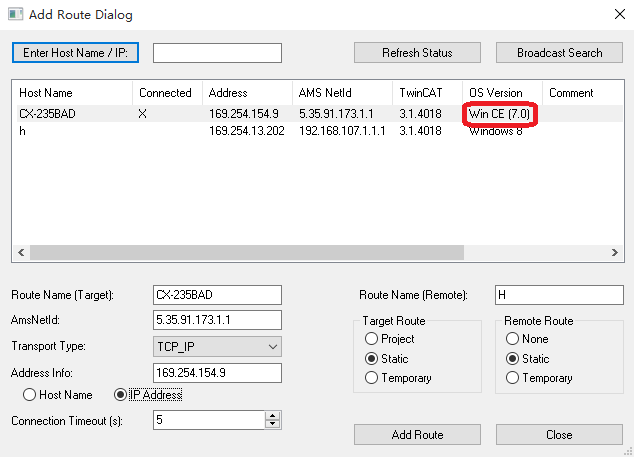
若成功则 Connected 列显示 X 标记, 如图所示:

点击 Close,返回前一窗体,可以见到刚刚添加的路由表项出现在列表中:
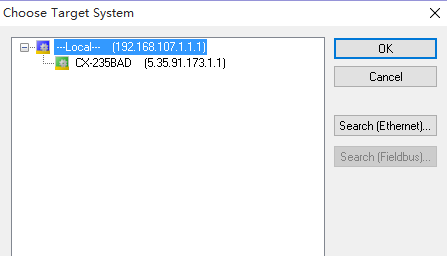
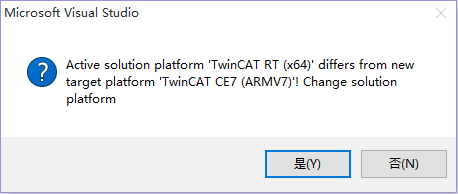
选中要配置的控制器,点击 OK,在弹出的窗口中选择yes切换操作系统:
如图所示,当前连接的控制器和操作系统都由本地模式切换到目标系统;


在窗体的右下角 为状态显示图标,并且目标控制器为配置模式时,图标显示蓝色,为运行模式时图标显示绿色。
为状态显示图标,并且目标控制器为配置模式时,图标显示蓝色,为运行模式时图标显示绿色。
3、TwinCAT NC 轴的配置
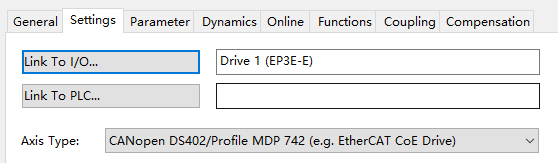
在我们扫描伺服从站时,同时系统能够把轴配置上并直接link到扫描到的伺服从站。
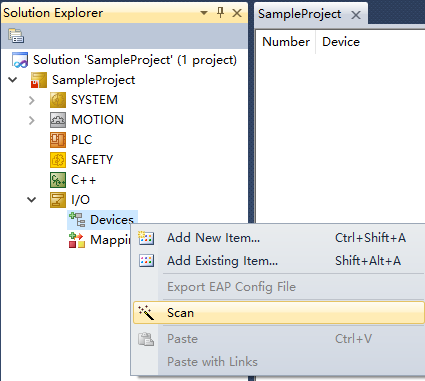
在配置模式下,点击左侧工程栏内IO,右键Devices,点击Scan,
在弹出的窗体中勾选(EtherCAT),点击OK,
Scan for boxes 选择YES;
EtherCAT drive(s) added... 选择YES 自动配置上轴并LINK;
Activate Free Run 选择NO。
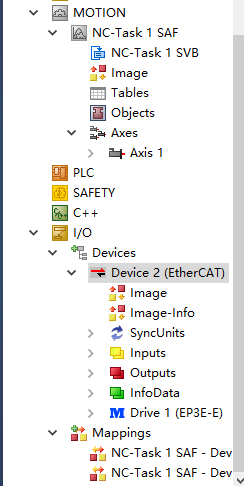
如图,工程栏添加上了从站伺服和相对应配置上了一个轴;
运转测试
4、修改AXIS1的部分参数:
由于在测试过程中,位置跟随误差可能出现较大偏差,所以建议暂时关闭跟随误差的监视:
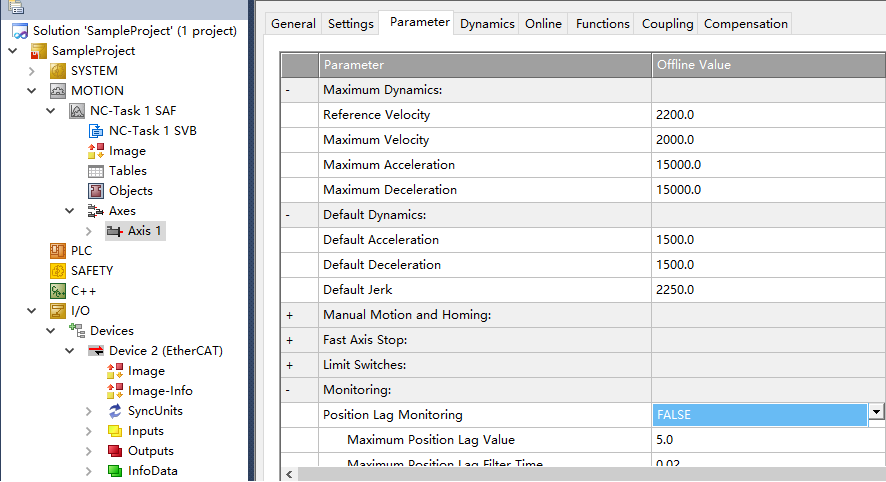
点击左侧工程栏中MOTION→Axes→Axis1,将Parameter窗口中的Monitoring下Position Lag Monitoring 改为false(关掉跟随误差监视);
点击左侧工程栏中MOTION→Axes→Axis1→Enc,将Parameter窗口中的ScalingFactor Numerator值设为60,ScalingFactor Denominator值改为131072(视EP3E-EC驱动器参数P603*65536+P604的实际值而定)。
Scaling Factor:每个位置反馈的编码器脉冲对应的距离。比如:电机转动一圈131072个脉冲,而电机转动一圈对应60mm,则Scaling Factor应为60/131072=0.000457763671875mm/Inc。
提示:对于空载调试, 习惯上, 把一圈设置为60mm, 这样,1mm/s的速度就相当于1圈/min。因为电机的额定速度单位是rpm,调试时以rpm为速度单位比较直观。

5、调试运行:
激活配置,转入运行模式;
点击工具栏中Activate Configuration 按钮,点击“确定”,进入运行模式,右下角图标变为绿色 。
。
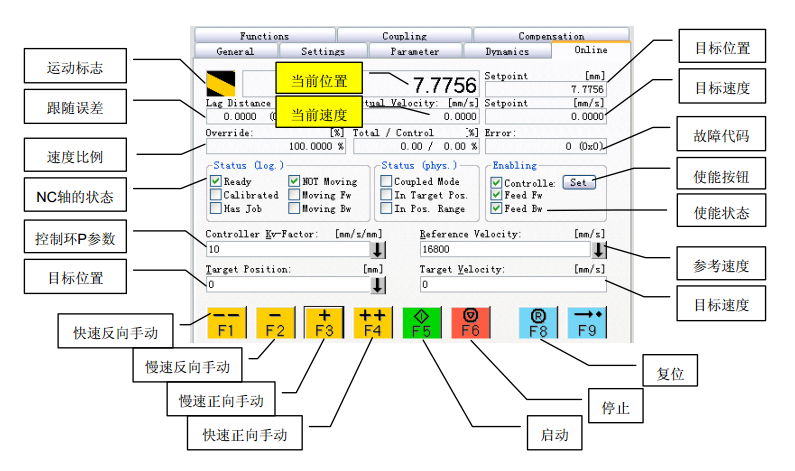
下图为调试页面,可进行使能、正反转快慢点动调试。
点动测试
在上图中,把 Kv-Factor 设为 0,并点击旁边的向下箭头,以下载该参数。
然后分别点击界面上的 F1-F9:
F1:反向快速点动,
F2:反向慢速点动,
F3:正向慢速点动,
F4:正向快速点动,
F5:按指定速度 Target Velocity 运动到指定位置 Target Position。
F6:停止当前动作。
F8: NC 轴复位。故障发生后, Error 文本框中有错误码代码提示。 F8 用于清除报警。
说明:此功能在 PLC 程序中通过功能块 MC_Jog 实现。









 联系我们
联系我们 CRM系统
CRM系统 在线服务
在线服务 官方微信
官方微信
