武汉迈信电气技术有限公司为国内首家成功研发出PROFINET伺服并支持PROFIDrive行规的伺服厂商。EP3E-PN已经通过了PROFINET Interface的测试认证以及PROFIDrive Layer部分AC4的报文3测试认证。

1
适用范围
西门子S7-200 SMART PLC通过PROFINET接口与EP3E PROFINET伺服驱动器连接。

2
原理概述
EP3E在最新软件中加入了对111报文的支持,S7-200 SMART PLC从固件版本V2.4开始增加了PROFINET通信的功能,通过PROFINET接口可与EP3E伺服驱动器进行通信连接,并可使用SINAMIC Control库中的SINA_POS功能块实现基本定位。
3
调试环境
- EP3E伺服驱动器软件版本(P003)为63.02及以上,内部版本d-re-0为9.4.28.1及以上
- 西门子S7-200 SMART PLC固件版本V2.4
- STEP 7-Micro/WIN SMART V2.4 调试软件
- STEP 7-Micro/WIN V2.4 SINAMIC control 库更新工具
https://support.industry.siemens.com/cs/cn/en/view/109766118/zh
- PRONETA 调试和诊断工具
- ServoSoftStudio伺服调试软件
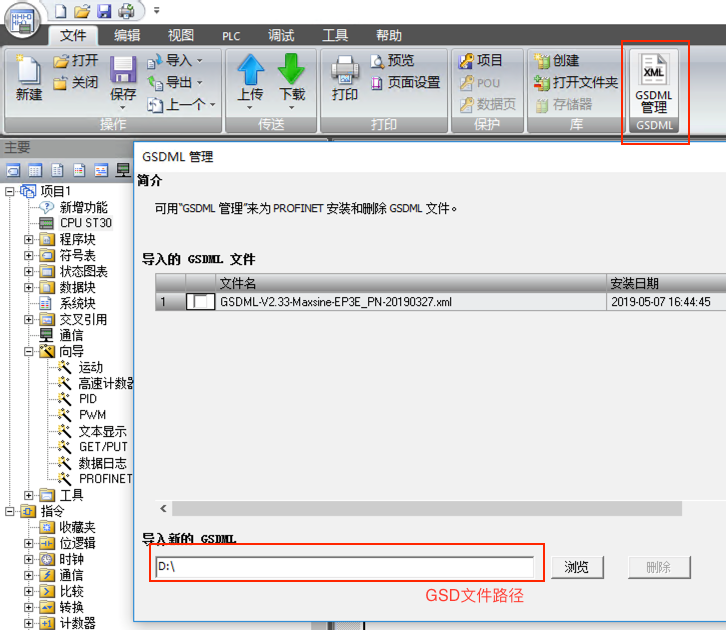
- EP3E PROFINET设备描述文件GSDML-V2.33-Maxsine-EP3E_PN-20190327.xml
4
技术实现
4.1 硬件连接
1. 参考《EP3E PROFINET使用手册》正确连接伺服驱动器电源、电机等;
2. 正确连接S7-200 SMART PLC的电源;
3. 将第一台伺服驱动器的X5端口与S7-200 SMART PLC的网口;如有多台伺服驱动器,将前一台的X6端口与下一台的X5端口连接;将最后一台伺服驱动器的X6端口与调试电脑连接。
4.2 伺服驱动器参数设置
4.2.1 通讯参数

P302、P304参数修改后,需要保存到EEPROM并重新上电才可生效,具体参数设置操作方法请参考《EP3E PROFINET使用手册》第3章3.4、3.5节。
4.2.2 机械参数
基本定位模式下的机械参数需要通过ServoSoftStudio软件设置,PC机通过USB口连接到伺服驱动器,点击工具栏中的字典,打开对象字典编辑器
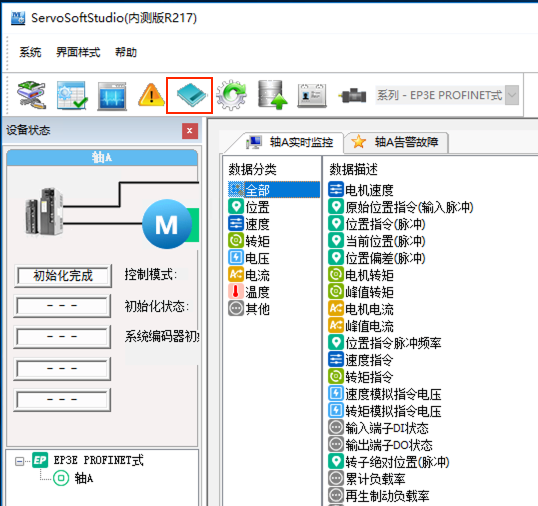
对象字典编辑器:

机械参数需根据实际情况正确设置,在齿轮比1:1,负载每转LU数为10000的情况下,如果负载每转对应的移动距离为10mm,则一个LU对应0.001mm。
机械参数修改后需要写入EEPROM并重新上电才可生效。
4.2.3 基本定位其他参数
最大加减速度、Jog点动参数、回零参数等都可通过ServoSoftStudio中的对象字典编辑器设置。
4.3 设备名称及IP设置
通过PRONETA工具或者TIA Portal博途设置伺服驱动器的设备名称和IP地址,注意:设备名称必须要与PLC工程中配置的名称相同。
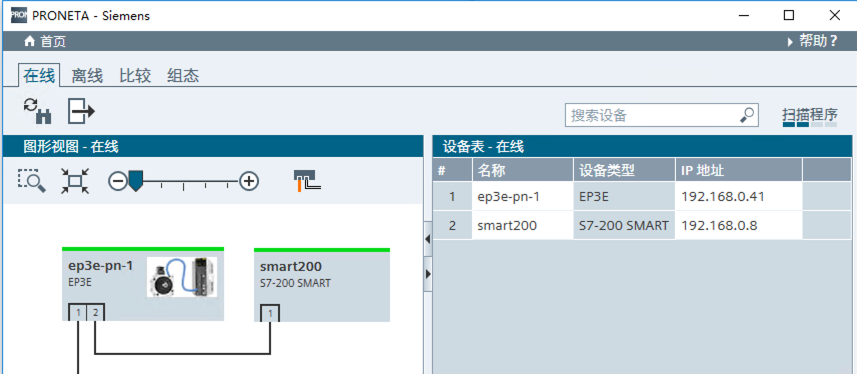
PRONETA工具的详细使用方法请参考西门子PRONETA文档。
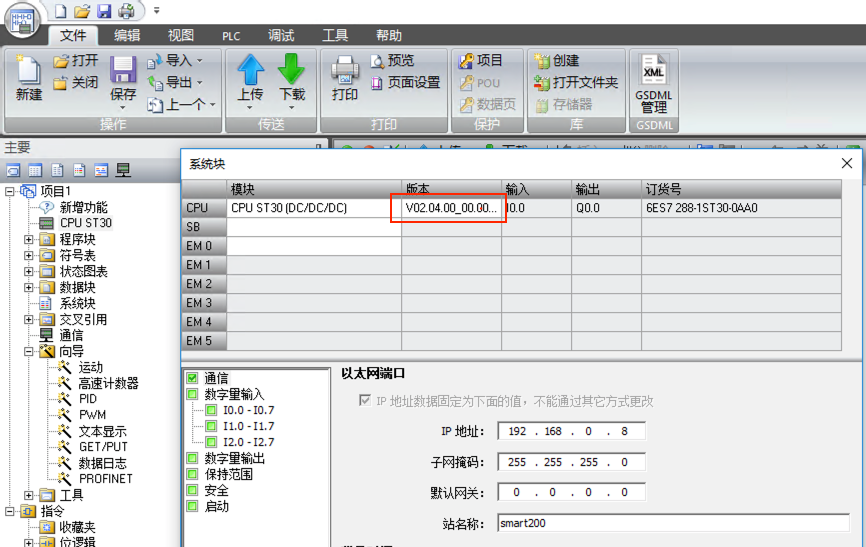
4.4 S7-200 SMART PLC项目配置
1. 创建PLC项目,确认PLC固件版本为V02.04
2. 导入GSD文件
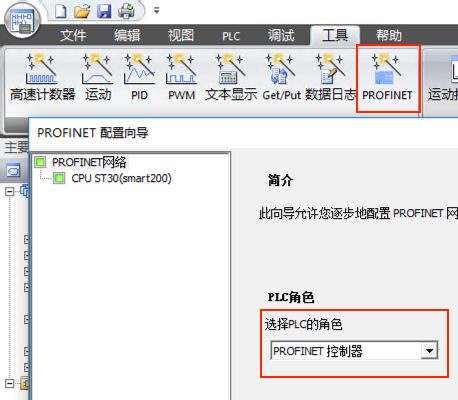
3. 通过PROFINET向导配置站点及报文,首先需启用PROFINET控制器,点击下一步;
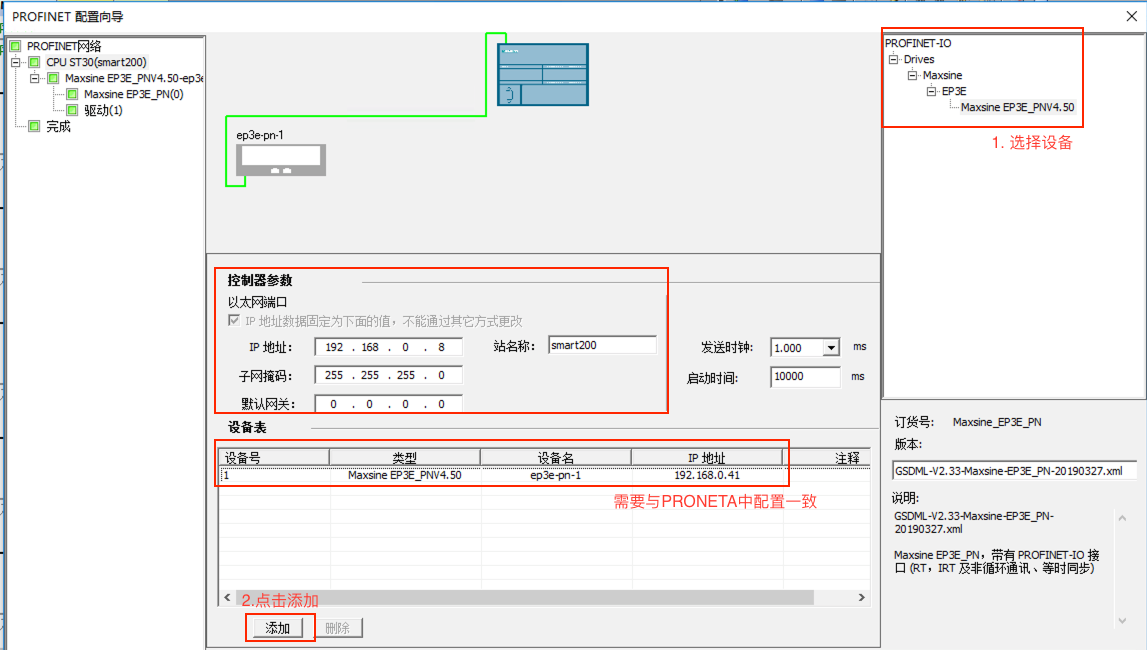
4. 设置PLC的IP,添加EP3E设备,并设置IP与设备名称,此处的设置需要与之前PRONETA工具设置的一致,之后点击下一步;
5. 添加111报文到模块列表中,最小的更新时间为4ms,并记住此处分配的输入输出起始地址:

6. 点击下一步,直到最终完成。
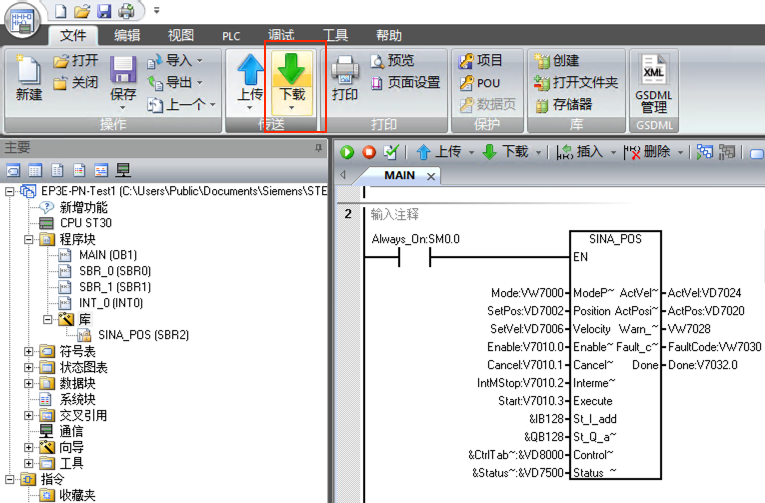
7. 主程序中编写程序,SINA_POS功能块的St_I_add和St_Q_add的地址与步骤5中111报文的输入输出地址对应
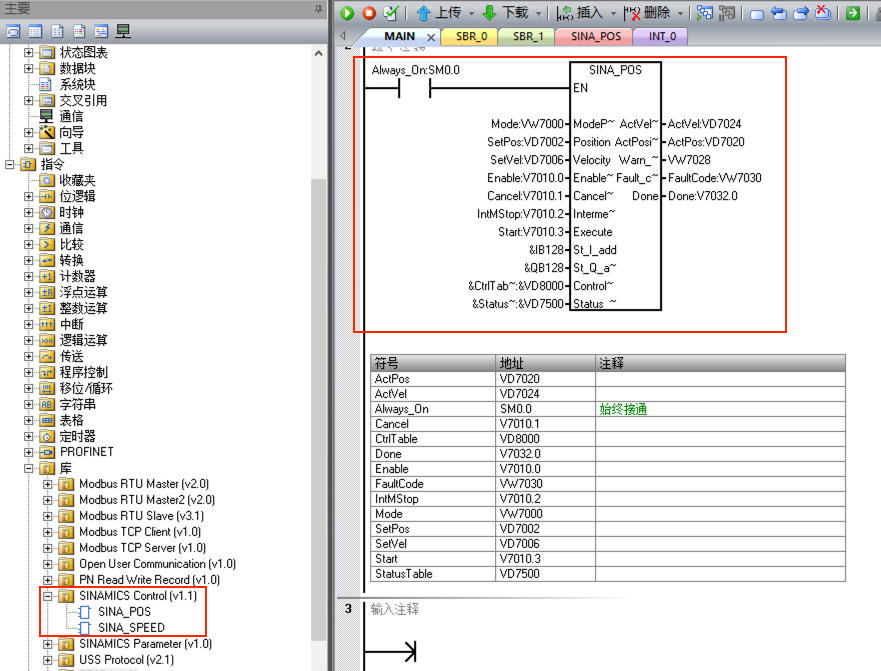
8. 程序中符号表定义:

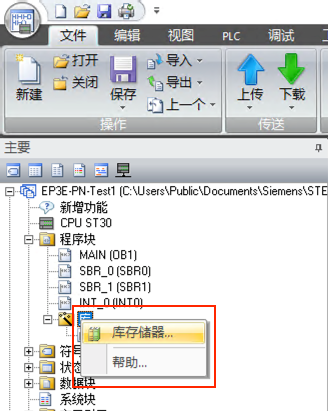
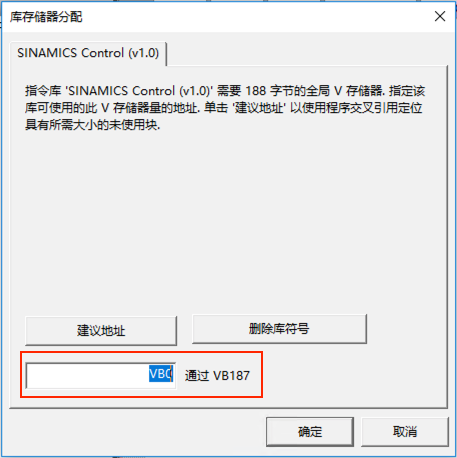
9. 分配库使用的V地址:
10. 下载程序
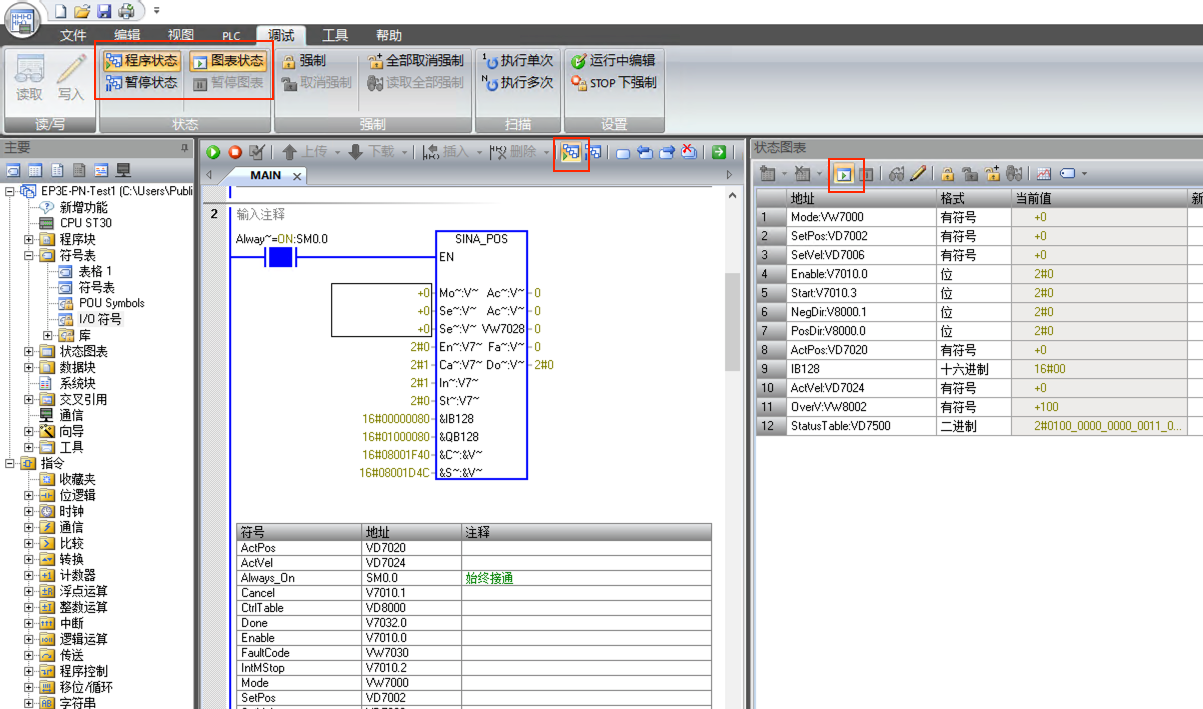
11. 通过状态图标测试功能
4.4.1 SINA_POS功能块
SINA_POS功能块相关说明请参考STEP7-Micro/Win SMART在线帮助中的SINAMICS库SINA_POS功能块的帮助说明,或下载S7-200 SMART系统手册:
https://support.industry.siemens.com/cs/document/109745610/s7-200-smart-系统手册-?dti=0&lc=zh-CN
当前EP3E伺服暂未开放程序段功能,SINA_POS中的8种操作模式,除模式6运行程序段外,其他功能均可使用。
参考资料
《EP3E PROFINET总线交流伺服驱动器使用手册》
《S7-200 SMART系统手册》
《S7-200 SMART通过PROFINET连接V90 PN实现基本定位控制》









 联系我们
联系我们 CRM系统
CRM系统 在线服务
在线服务 官方微信
官方微信
